
全地形移动的微型机器人在复杂地形翻滚

一种新的全地形microbot移动翻滚可以帮助各种应用迎来微型机械式。
“微型磁翻滚机器人,”或μTUM(microtum),约400到800微米,或者百万分之一米,小于一个针头。连续旋转磁场驱动的微型机器人在月底结束或侧向翻滚运动,这有助于microbot导线不均匀的表面如凸起和沟槽,其他形式的运动的一个艰难的壮举。
“μ量子能在干燥和潮湿的环境中穿越复杂的地形,说:”David Cappelleri,副教授,普渡大学机械工程学院主任和普度的多尺度机器人与自动化实验室。
结果是一个研究论文在线发表在2月3日的期刊类详细。本文是由普度大学研究生程浩碧;博士后研究员Maria Guix;博士生Benjamin V. Johnson;吴明静,一个在劳伦斯科技大学机械工程学助理教授;Cappelleri。
平,大致哑铃形微型机器人是由聚合物和两磁端。非磁性的腹部会携带货物如药物。由于机器人在潮湿环境中很好地发挥作用,因此具有潜在的生物医学应用前景。YouTube视频如下:
“在微型机器人和纳米尺度的代表之一,在智能自动化系统的新领域,”Cappelleri说。“特别是,移动微机器人最近出现的生物医学应用的可行的候选人,利用其体积小,操纵,自主运动能力。靶向药物是这些纳米关键应用和微型机器人。”
药微型机器人可能配合使用超声引导他们到他们的目的地在体内。
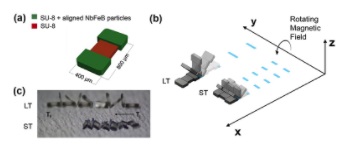 左边是一个由普渡大学的研究人员开发的新microtum机器人示意图。小机器人跌倒在两种模式,如图所示在右。在底部,一个静止的照片的微型机器人的运动是从一个视频捕获。(普渡大学图像/程浩碧,Maria Guix)
左边是一个由普渡大学的研究人员开发的新microtum机器人示意图。小机器人跌倒在两种模式,如图所示在右。在底部,一个静止的照片的微型机器人的运动是从一个视频捕获。(普渡大学图像/程浩碧,Maria Guix)
研究人员研究了这台机器在倾斜60度时的性能,在潮湿和干燥的环境中显示出令人印象深刻的爬坡能力。
“爬的能力是很重要的因为在人体表面是复杂的,”Guix说。“很颠簸,很粘。”
对于许多应用的理想技术将是一个完美的微型机器人,能适应各种环境,操作简单。微型机器人动画通过磁场表现出的承诺,Cappelleri说。
而概念探索迄今还需要复杂的设计和加工方法,该μTum与半导体工业中使用标准光刻技术生产。新研究的机器人设计、制造和使用旋转磁场来操作他们在战略谈判复杂地形。
在这样的微型机器人发展的一个关键因素是分子,是普遍的微米尺度的而不是日常生活的宏观之间的静电和范德瓦尔斯力的影响。力造成的“小部件,影响其运行之间的静摩擦”。研究人员模拟了这种力量的影响。
“在干旱条件下,这些力量使它移动微型机器人在人体内它的位置非常具有挑战性的,”Guix说。“他们在流体介质中表现得更好。”
因为微小的机器人包含如此小的数量和磁性材料的表面积,它需要一个相对强的磁场来移动它们。同时,生物流体或表面抵抗运动。
 ;“这是问题,因为微型机器人在实际工作环境中成功经营,流动性是至关重要的,”Cappelleri说。
克服这个问题的一个方法是翻滚运动,它需要比其他需要更低的磁场强度。机器人性能的另一个关键是不断旋转的磁场。
“不像microtum,其他微型机器人使用的交变磁场下摇摆运动,在机器人和表面之间的接触不断失而复得,”毕说。“虽然不断旋转磁场用于μTUM是实现比交变磁场越大,权衡的是,翻滚的机器人一直在与地面的接触点,但在它的路径没有锋利的陡坡或悬崖。这种持续的接触意味着μTUM设计可以利用本身的表面下面之间不断的附着力和摩擦力爬上陡峭的倾斜的地形。”
microbot是干纸表面进行测试,并在水和硅油来衡量和表征在不同粘度的流体环境的能力。研究结果显示,高粘性流体如硅油限制了机器人的最高速度,而低密度的介质,如空气,限制了它们能爬多高。
的microtum可能升级的“高级”粘连功能的生物医学应用进行药。
未来的工作将集中在μTUM预测其运动轨迹复杂地形动态建模,以及解决在不同环境界面的独特挑战。另外的目标包括开发一种基于视觉的控制系统,该系统使用摄像机或传感器进行精确导航,并利用这种机器人精确地操纵潜在工业应用对象。也将探索机器人中段的替代设计。
“所有的设计配置考虑,机器人的腹部保持非磁化为探索这一地区的机器人嵌入有效载荷的未来的可能性,”Cappelleri说。“用柔性材料或可溶性有效载荷代替这个区域可以导致改进的动态行为,和体内给药,分别在微对象操作和生物医学应用前景。”