
创建3D打印软网格机器人
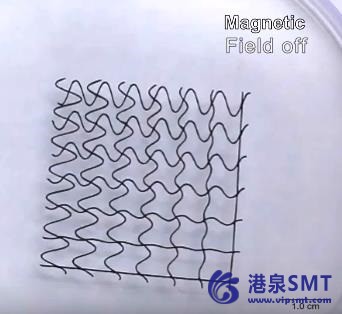

北卡罗莱纳州立大学的研究人员已经创造出3D打印的柔性网格结构,可以在水上漂浮时通过外加磁场进行控制。这种结构可以抓取小物体并携带水滴,使它们成为模拟生活在水面上的生物或细胞培养用组织支架的软性机器人的潜力。
“这项研究显示了3D打印和软机器人技术相结合的新兴领域的能力,”Orlin Velev,S.Frank和Doris Culberson说,他是北卡罗来纳州化学和生物分子工程的杰出教授,也是描述这项研究的一篇论文的相应作者。
为了创造出这些结构,研究人员用硅微珠制作了一种“墨水”,这种墨水是由液态硅胶合而成,并包含在水中。产生的“同成分触变膏”类似于普通牙膏,它可以很容易地从牙管中挤出,但在牙刷上保持形状而不会滴落。研究人员用一台3D打印机把浆糊做成网状图案。这些图案随后在烤箱中固化,形成柔性硅结构,可以通过施加磁场来控制拉伸和折叠。
“这种自我增强的糊状物让我们能够创造出超柔软和灵活的结构,”SangchulRoh说,他是维列夫实验室的北卡罗来纳州立大学博士生,也是论文的第一作者。
材料科学与工程教授、该项目的高级合作研究员约瑟夫·特蕾西补充说:“广泛使用的具有高磁化强度的铁羰基粒子的嵌入使我们能够对磁场梯度产生强烈的响应。”
维列夫说:“这些结构也是辅助的,这意味着它们可以向各个方向扩张和收缩。”“通过3D打印,我们可以控制磁场施加前后的形状。”
这种结构的特性也允许它们漂浮在水面上时使用,类似于水上步行者,或昆虫在水面上滑行或跳跃。
卢武铉说:“模仿体内的活组织是这些结构的另一个可能应用。”
在这篇发表在《先进材料技术》专刊上的论文中,研究人员展示了他们如何设计可重构的网格,一种可以“抓住”铝箔小球的结构,以及一种可以“携带”单个水滴然后通过网格按需释放的结构。
“目前,这是一个早期阶段的概念验证软机器人执行器,”韦列夫说。