
一种可重构的软执行器

机械系统,如发动机和发动机,依赖于两种主要的刚性部件运动:直线运动,包括直线上从一点移动到另一点的物体;旋转运动,包括在轴上旋转的物体。
大自然已经发展出更为复杂的运动形式——或者说驱动形式,可以更直接地用软部件执行复杂的功能。例如,我们的眼睛可以通过收缩软肌肉来改变角膜的形状来改变焦点。相比之下,相机通过沿直线移动实体镜头来聚焦,可以手动或自动聚焦。
但如果我们能模仿自然界中的形状变化和运动呢?
现在,哈佛大学约翰·A·鲍尔森工程与应用科学学院(SEAS)的研究人员已经开发出一种方法来改变弹性体平板的形状,该方法使用快速、可逆、受外加电压控制、可重新配置为不同形状的驱动。
“我们把这项工作看作是开发一种软的、变形的材料的第一步,这种材料可以根据计算机发出的电子控制信号改变形状,”海洋材料领域的延伸塔尔家族教授、论文的高级作者大卫克拉克说。“这类似于20世纪50年代从硅中制造集成电路的第一步,取代由分立的单个元件构成的电路。正如那些集成电路与当今电子设备的性能相比是原始的一样,我们的设备具有简单但集成的电导体和电介质的三维结构,并演示了可编程重新配置的元素,以创建大而可逆的形状变化。”
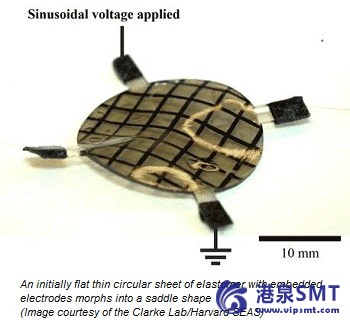
可重构弹性体板由多层组成。在每一层之间加入不同形状的碳纳米管电极。当电压施加到这些电极上时,弹性体板内部会产生一个空间变化的电场,产生不均匀的材料几何变化,使其变形为可控的三维形状。
不同的电极组可以独立地打开,从而使不同形状的电极组可以基于哪个电极组打开,哪个电极组关闭。
论文的第一作者、海洋研究生Ehsan Hajiesmaili说:“除了可重新配置和可逆性之外,这些形状变形的驱动具有与自然肌肉相似的功率密度。这种功能可以改变机械设备的工作方式。”目前有一些设备可以利用更复杂的变形来更有效地工作,如光学镜和透镜。更重要的是,这种驱动方法为新型装置打开了大门,因为所需的复杂变形,如形状变形的翼型,这些装置被认为过于复杂,无法继续使用。”
在这项研究中,研究小组还预测了驱动形状,给出了电极排列和外加电压的设计。下一步,研究人员的目标是解决这个反问题:给定一个理想的驱动形状,电极的设计和所需的电压将导致它?
哈佛技术发展办公室保护了与本项目有关的知识产权,并正在探索商业化的机会。
这项研究是由哈佛大学MRSEC通过国家科学基金会资助的。