
一部汽车雷达试驾片

自动驾驶车辆中的传感器必须非常可靠,因为将来驾驶员在行驶过程中将不再持续监控交通。过去,这些传感器经受了艰苦的道路测试。弗劳恩霍夫高频物理和雷达技术研究所的新中庭测试设备现在可以将大部分的道路测试转移到实验室。中庭为车辆的雷达传感器进行了展示,产生的人工景物非常接近街道交通中遇到的实际情况。
明天的车会自己开。乘客们会像私人司机一样在路上行驶,一边享受谈话,一边看报纸,或者看视频。尽管自动距离控制等驾驶员辅助系统已不再是市场上的新产品,但完全自主的汽车要走上街头还需要几年的时间。这是因为所涉及的技术必须绝对可靠。传感器是这里的决定性因素:例如,今天的雷达传感器已经能够独立地探测障碍物并在危险情况下应用刹车。这些传感器和其他传感器在安装到车上之前都经过了严格的测试。而且,自动驾驶汽车需要更高的可靠性,因为如果驾驶员不再在驾驶,汽车制造商很可能最终负责避免事故发生。
这就是为什么汽车制造商在传感器可靠性方面要求相对较高的原因。他们需要的传感器在数百万公里的行驶距离上只会导致一个错误,这意味着今天的汽车通常需要完成很长的路试。“那有很多公里,”英博士说。托马斯达尔曼,弗劳恩霍夫高频物理和雷达技术研究所的亚琛领导研究小组。“除此之外,还必须测试多个传感器,以在统计上证明其可靠性。这意味着几辆装有传感器的测试车辆必须在路上花费相当长的时间。“另一个困难是:如果几千公里后发生错误,传感器必须进行优化,道路测试必须重新开始,这是一个非常耗时的过程。”
将道路测试转移到实验室
为了简化这种情况,正在尝试模拟现实,并将道路试验带入实验室。这种雷达传感器的实验室测试已经存在。雷达传感器发出无线电信号,由各种物体反射。基于回波,电子传感器系统可以分析周围环境,测量到被探测物体的距离和移动速度。
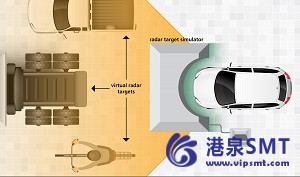
这一原理已经在实验室用所谓的雷达目标模拟器进行了模拟。这些模拟器收集车辆雷达发出的雷达波,并修改雷达信号,使其表现出好像遇到过物体一样。然后,模拟器以人工回波图像的形式将信息返回给汽车。因此,雷达目标模拟器为车辆的雷达生成一个模拟景观。其优势是显而易见的:带有汽车雷达和雷达目标模拟器的试验台可以日夜在实验室里运行,而无需将汽车开到街上。
不幸的是,目前市面上仅有的几个雷达目标模拟器还远不能产生完整的回波图像。达尔曼说:“大多数模型只能产生一个高度受限的图像,反射的次数只有一位数,反射到汽车的雷达上。”“与自然环境相比,这是一个非常小的数字。”毕竟,真正的风景包含了数百个反射物体:人、车、树、交通信号。即使是在交通中的一辆车也能从不同的角度产生不同的反射,例如一辆客车,其保险杠、车轮和侧视镜的反射不同。“在测试自动驾驶传感器时,我们离现实环境还很远,”工程师继续说道。
雷达目标模拟器产生多达300个反射。
这就是为什么Dallmann和他的团队正在开发一种新的、性能更高的雷达目标模拟器,叫做Atrium(德国首字母缩写为“自动测试环境中的雷达环路测试和测量”),能够产生更多的反射物体。弗劳恩霍夫跳频雷达的当前目标是在项目结束时产生300个反射,这是一个巨大的目标。“这意味着中庭可以为汽车的雷达传感器呈现出一个相对真实的生活场景,类似于雷达传感器的一部驾驶电影。”
由于中庭技术的专利申请已经提出,托马斯达尔曼还不能透露任何细节。但他可以说:“我们已经优化了传输通道的结构,使其更具成本效益。因此,反射波可以从多个不同的方向到达雷达。“这可以使在实验室的全范围和高度真实的条件下测试新的自主车辆传感器成为可能。”未来,我们将能够进行高度复杂的测试,这将使它成为可能。很可能
减少道路测试的时间。”Dallmann和他的同事将于5月21日至23日在斯图加特的汽车测试博览会上展示实验室测试设施和车辆雷达和中庭雷达目标模拟器。