
神经科学的触摸支持改进机器人和假体的接口

压力 — — 物理量的触摸体验 — — 是人类感知,输送到大脑不只皮肤接触到的东西,一个基本维度却也如何激烈联系人。这种意识是一种使人,例如,轻轻地但却安全地处理一个鸡蛋没有硬的壳裂缝挤压。
了解压力和其他方面和学习如何传达他们通过机械臂和其他机器是触觉的 DARPA 的追求为伤员服务成员创建先进的假肢和解锁新的能力,为其他应用程序的人机系统的核心。现在,资助由 DARPA 的手本体感受和触摸接口 (HAPTIX) 程序,包括来自凯斯西储大学、 路易 · 斯托克斯克利夫兰 VA 医学中心和芝加哥大学的研究人员研究团队实现这一目标,在科学与转化医学 》 杂志上报告先进如何编码的使用电刺激中枢神经系统中的压力梯度的感觉的发现。
HAPTIX 项目经理道格 · 韦伯说:”DARPA 正在努力通过刺激周围神经,唤醒人们自然主义的触摸和用户的先进假肢的运动”。”确定中枢神经系统如何编码的不同方面的触摸是一项巨大的挑战,但有了这些知识,我们可以工程师更有能力的神经接口,可以重新定义人与工具和机器的交互。
两名志愿者的帮助下,上肢截肢有谁和谁有手术植入的神经接口在其残余的上臂树桩,超过两年,研究人员曾进行测试,辨别脑如触摸压力如何解释的振幅和频率电刺激神经。
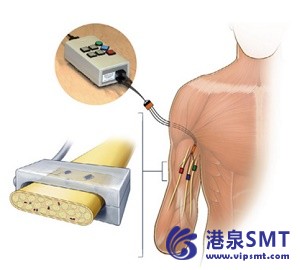
在 HAPTIX 系统中,当压力传感器上假手穿的志愿者都参与,他们向发送信号在志愿者的体的外部刺激。刺激器然后将电脉冲信号发送到环绕在志愿者的手臂树桩的主要神经束的电极 — — 相同神经束控制在截肢前志愿者的手。图案的刺激被通过神经向大脑,解释这些模式来辨别不同的强度水平。
研究小组发现,通过调节神经纤维刺激 (刺激振幅) 的数量和频率的刺激,感官信息的传送通过外周神经系统对大脑这样,志愿者可以区分层次分明的触觉的强度。通过解耦刺激振幅和频率和变一次,研究人员可以预测压力感知的程度。
研究人员测试了志愿者的能力辨别触觉强度三个方面︰ 区分多么小的差异刺激他可以检测作为不同压力级别;评分的强度不同的信号;比较和匹配的感觉经历假肢手放在他手上完整的实测压力与强度。在最后的测试中,研究人员发现,志愿者可以每个可靠关联压力通过假肢与实际压力完整手上的感觉。实验结果表明用户可以辨别 20 个不同级别的强度由志愿人员被理解为程度的压力。
DARPA 资助的研究人员先前已启用仿生智能假肢使用连接到中枢和外周神经系统的脑-机接口的电机的控制。这个月早些时候 DARPA 宣布其革命性假肢项目团队能够传达触摸的感觉,从一个机械臂以一名志愿者大脑中通过直接的神经接口。这项研究补充先前的示威行动下的 HAPTIX 程序,用于假肢和外周神经系统之间的侵入性较小接口传递触觉刺激。然而,在所有这些情况下,用户有限知道多少压力被应用于其机械的位数,或它们被应用到多少压力持有对象的能力。这从 HAPTIX 程序的最新成果新揭示背后的触觉定量的神经机制,可以支持更现实的神经接口的大量应用程序。