
灵活的皮肤可以帮助机器人,假肢通过感知剪切力来完成日常任务。


如果一个机器人来禁用一个路边炸弹或小心地处理一个鸡蛋烹饪时你做的煎蛋卷-它需要能够感觉到物体滑出它的把握。
然而到目前为止,大多数机器人和假手都难以准确地感知震动和剪切力的发生,例如当手指沿着桌面滑动或物体下落时。PCBA加工
现在,来自华盛顿大学和加州大学洛杉矶分校的工程师们已经开发出一种柔性传感器的“皮肤”,可伸过来的任何部分,机器人的身体或假体准确传达信息的剪切力和振动,要成功地把握和处理对象的关键。
在传感器和执行器中发表的一篇论文中描述了仿生机器人传感器皮肤,它模仿人体手指沿着表面滑动或区分不同纹理时的张力和压缩方式。它测量了这种触觉信息,其精确度和灵敏度与人类皮肤相似,可以大大提高机器人执行从外科手术和工业程序到清洁厨房的一切能力。
机器人和假手现在确实是建立在视觉提示的基础上的,比如,“我能看到我的手缠绕着这个物体吗?”“或者”它触到这根电线了吗?“但这显然是不完全的信息,”资深作者Jonathan Posner说,他是华盛顿大学机械工程与化学工程教授。
如果一个机器人要拆一个简易爆炸装置,它需要知道它的手是沿着电线滑动还是拉着它。要抓住一个医疗仪器,它需要知道物体是否在滑动。波斯纳说:“这一切都需要感知剪切力的能力,而没有其他传感器的皮肤能够做到这一点。”。
 一些机器人今天充分利用仪器的手指,而“触摸”是有限的,附件,你不能改变它的形状和大小,以适应不同的任务感。另一种方法是将机器人附件封装在传感器皮肤中,从而提供更好的设计灵活性。但是这种皮肤还没有提供完整的触觉信息。
一些机器人今天充分利用仪器的手指,而“触摸”是有限的,附件,你不能改变它的形状和大小,以适应不同的任务感。另一种方法是将机器人附件封装在传感器皮肤中,从而提供更好的设计灵活性。但是这种皮肤还没有提供完整的触觉信息。
传统上,触觉传感器的设计侧重于检测单个模态:正常力、剪切力或振动。然而,灵巧的操作是一个动态的过程,需要多模态的方法。事实上,我们最新的皮肤样机采用三种方式创造了机器学习提高机器人的能力为基础的方法,很多新的可能性,”合著者和机器人合作者Veronica桑托斯说,大学的副教授,机械和航空航天工程。
新的可拉伸的电子皮肤,这是在UW的华盛顿的纳米加工的工厂生产的,是由相同的硅橡胶用于游泳护目镜。这种橡胶嵌有细小的蛇形通道——大约是人类头发的一半宽度——充满了导电的液态金属,当皮肤伸展时,它不会开裂或疲劳,就像实心电线一样。
当皮肤被放置在机器人手指或末端执行器周围时,这些微流体通道被战略性地放置在人体指甲的两侧。
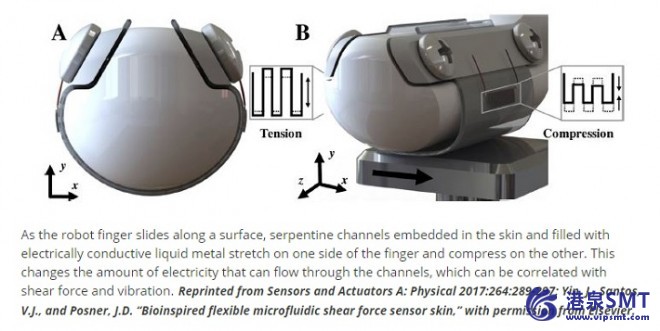
当你滑动你的手指在一个表面,一边你甲鼓起,而另一边在紧张绷紧。同样的事情也发生在机器人和假肢手指微流控通道在床的压缩一边的伸展。
当通道的几何形状发生变化时,流过它们的电流量也随之变化。研究小组可以测量电阻的这些差异,并将它们与机器人手指所经历的剪切力和振动联系起来。
当机器人的手指沿着一个表面滑动时,蜿蜒的通道充满了导电的液态金属,嵌入在手指一侧的橡皮皮上,并在另一侧挤压。这改变了流过通道的电流量,可以测量并与剪切力和振动相关联。
 ;
“这真是继人类生物学的线索,”主要作者简竹银说,他最近获得了博士学位,在机械工程中的UW。“我们的电子皮肤凸起的一侧就像人的手指、传感器测量的剪切力是物理上位于甲床会,结果在一个传感器进行性能相近的人的手指。”
将传感器放在手指最易接触的部位,使人们更容易分辨出剪切力和与物体相互作用时产生的正常“推”力,这与其他传感器皮肤解决方案很难做到。
从工程和UCLA Henry Samueli工程学院和应用科学学院大学的研究小组证明了身体健壮,耐化学性皮肤温度传感器具有很高的精度和灵敏度的光触摸应用打开了大门,与一个电话,颤抖的手,拿起包,处理的对象,在别人。最近的实验表明,皮肤每秒能探测到800次微小的振动,比人类的手指还要好。
波斯纳说:“通过模仿柔性电子皮肤中的人体生理机能,我们已经达到了与人类双手一致的灵敏度和精确性,这是一个重大突破。”。触觉对于假肢和机器人应用都是至关重要的,而这正是我们最终要创造的。
这项研究由美国国家科学基金会资助。