
Robo Picker Grasps和包

打开杂货店是一项简单但乏味的工作:你把手伸到袋子里,摸索着找一件东西,然后把它拉出来。快速浏览会告诉你物品是什么,应该存放在哪里。
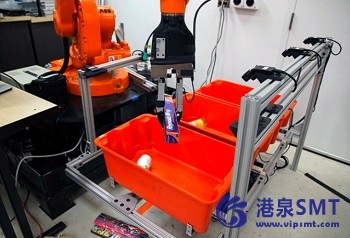
图片说明:“选择和放置”系统由一个标准的工业机器人手臂组成,研究人员配备了一个定制的手爪和吸盘。他们开发了一种“对象不可知论”的抓取算法,使机器人能够评估一堆随机物体,并确定在杂波中抓住或抽吸物品的最佳方法,而不必在拾取物体之前知道任何物体。 ;Melanie Gonick /麻省理工学院
如今,麻省理工学院和普林斯顿大学的工程师们已经开发出一种机器人系统,它可能有一天会帮助完成这项家务工作,并协助其他拣货和分拣工作,从仓库中组织产品到清除灾区的瓦砾。
该团队的“选择和放置”系统由一个标准的工业机器人手臂组成,研究人员配备了一个定制的手爪和吸盘。他们开发了一种“对象不可知论”的抓取算法,使机器人能够评估一堆随机物体,并确定在杂波中抓住或抽吸物品的最佳方法,而不必在拾取物体之前知道任何物体。
一旦它成功地抓住了一件物品,机器人就会从箱子里把它提出来。然后,一组摄像机从不同角度拍摄对象的图像,借助于一种新的图像匹配算法,机器人可以将被摄物体的图像与其他图像库进行比较,以找到最接近的匹配。这样,机器人识别的对象,然后把它放在一个单独的仓。
一般来说,机器人遵循“先抓后认”的工作流程,与其他的拾取和定位技术相比,这是一个有效的序列。
这可以应用于仓库分类,也可用于从厨房橱柜中挑选物品或在事故后清除杂物。在许多情况下,采摘技术可能会产生影响,”麻省理工学院机械工程领域的沃尔特.亨利.盖尔.职业生涯发展教授Alberto Rodriguez说。
罗德里格兹和他的同事在麻省理工学院和普林斯顿将提交一份论文详细介绍他们的系统在IEEE国际机器人与自动化会议,在5月。
建立成功与失败的图书馆
虽然选择和放置技术可能有很多用途,但现有系统通常只在严格控制的环境中运行。
今天,大多数工业采摘机器人是专为一个特定的,重复的任务,如抓住汽车零件下线,始终在同一个,仔细校准的方向。然而,罗德里格兹正在设计机器人更灵活,适应性强,和智能采摘,非结构化的设置如零售仓库,其中一个选择器可能会不断遇到得数百,如果不是数以千计的新对象的每一天,经常在密集杂波。
该小组的设计基于两个一般的操作:采摘-成功地抓住一个物体的行为,和感知-识别和分类一个对象的能力,一旦掌握;
研究人员训练机器人手臂来挑选新的对象从一个杂乱的垃圾桶,使用四个主要把握行为的任何一个:吸到一个物体上,或垂直,或从侧面;夹持物体垂直像街机游戏的爪;或者,为对象,是嵌在墙上,扣人心弦的垂直,然后使用一个灵活的铲到对象与壁面间的滑动。
罗德里格兹和他的团队展示了从机器人的制高点捕捉到的杂乱物体的机器人图像。然后他们给哪些对象是可理解的机器人,它的四个主要抓行为,并不是每一例,标记为成功或失败。他们为数百个例子做了这些,随着时间的推移,研究人员建立了一个收集成功和失败的库。然后,他们把这个库并入一个“深神经网络”——一种学习算法,它使机器人能够根据其成功和失败的库来匹配过去所面临的当前问题,并从过去获得成功的结果。
“我们开发了一个系统,只是在寻找一个充满物体的手提包,机器人知道如何预测哪些是可理解的或suctionable,并配置这些采摘行为可能是成功的,”罗德里格兹说。“一旦它在夹持器中,物体就很容易辨认,没有杂乱的东西。”
从像素到标签
研究人员以相似的方式开发了一种感知系统,使机器人能够成功地识别和分类一个物体。
为了做到这一点,他们首先组装了从零售商网站等在线资源获取的产品图片库。他们用正确的标识对每个图像进行标记,例如,管道磁带和掩蔽磁带,然后开发另一种学习算法,将给定图像中的像素与给定对象的正确标签相关联。
罗德里格兹说:“我们正在比较的东西,对于人类来说,可能很容易识别,但实际上,作为像素,它们可能看起来有很大的不同。”。“我们确保该算法适用于这些训练示例。然后希望我们已经给了它足够的训练例子,当我们给它一个新的对象时,它也会预测正确的标签。
去年七月,球队把2吨的机器人并把它运到日本,在那里,一个月后,他们重新组装它参与亚马逊的机器人挑战赛,每年竞争主办的在线megaretailer仓库技术鼓励创新。罗德里格兹的团队是参加一个从杂乱的垃圾箱里捡东西的竞赛的16人之一。
最后,该团队的机器人在使用吸力时拾取物体的成功率为54%,抓取成功率为75%,并能识别出100%精度的新物体。机器人也在规定的时间内存放了所有20个物体。
对于他的工作,罗德里格兹最近获得了亚马逊研究奖,并将与该公司合作,进一步改进选位技术——最重要的是它的速度和反应性。
“在非结构化环境中采摘不可靠,除非你加入一定程度的活动性,”罗德里格兹说。当人类挑选时,我们会做一些小的调整。我想,弄清楚如何做更灵敏的采摘是我们感兴趣的关键技术之一。
该小组已经采取了一些步骤,通过增加触觉传感器到机器人的手爪和运行系统通过一个新的培训制度朝着这个目标。
“手爪现在有触觉传感器,我们已经启用了一个系统,机器人整天不停地把东西从一个地方移到另一个地方。”。罗德里格兹说:“它捕捉到成功和失败的信息,以及拾取或无法拾取物体的感觉。”。“希望这将使用这些信息来开始带,活动性把握。”