
认识到工作的正确工具


一位与日本同事合作的明星研究人员已经开发出一种方法,通过这种方法,机器人可以自动识别出一个物体作为潜在的工具,并使用它,尽管以前从未见过。
对于人类来说,识别和使用工具的能力几乎是本能的。还有许多例子表明,工具的使用似乎与动物的大脑有着千丝万缕的联系:例如,一些鸟类和灵长类动物使用棍棒或石头来获取食物。一个提出的原因,这种神经嵌入使用工具的能力是,动物的大脑感知外部物体作为其自身身体的延伸。受这一想法的启发,Keng Peng Tee和他的同事们(来自A*Star信息通信研究所)以及位于日本筑波的CNRS-AIST联合机器人实验室的Gowrishankar Ganesh共同开发了一种算法,使机器人能够识别并立即使用以前从未见过的工具。
Ganesh先前的研究表明,人类大脑不仅通过肢体的物理特征,而且通过肢体的功能来识别肢体。基于这一观点,Ganesh和A*Star团队提出,机器人可以通过将其形状与用于完成相同任务的手和臂的形状进行比较来识别工具的潜力。他们基于这个想法编写了一个算法,并通过设置一个机器人在没有抓取的情况下将磁盘移动到一张桌子上所需的终点来测试它。这涉及到机器人要么把磁盘拉向自己,把它推开,要么把它移向一边。
tee解释说,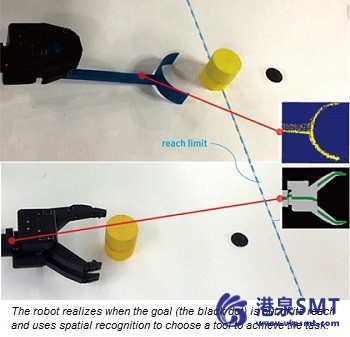 “机器人被编程为能够自己完成任务,用手形模板表示。”当任务无法完成时,例如,由于它的手臂不够长,机器人可以通过将工具形状与手形模板匹配来识别可行的工具。
“机器人被编程为能够自己完成任务,用手形模板表示。”当任务无法完成时,例如,由于它的手臂不够长,机器人可以通过将工具形状与手形模板匹配来识别可行的工具。
因此,该算法使机器人能够成功地识别没有工具无法执行任务的时间,识别未知对象作为潜在工具,然后使用该工具来完成任务。“下一步,我们将研究代表现有技能的功能的自动学习,而不是预先定义手形模板,”Tee说。